近期智能驾驶事故频发,引发关于激光雷达和纯视觉系统安全性的热议,国内车企在跟随特斯拉模式时面临挑战,不能简单模仿其在智能驾驶技术上的做法,关于哪种技术更安全,尚需进一步研究和验证。
电脑知识网4月14日消息,随着智能驾驶的普及,相关事故越来越多,这当然跟车企夸大的宣传有关,更多的还是司机对自己的不负责。
智能驾驶不等于自动驾驶,而因它引起的事故也让大家又一次对哪种雷达方案引起了争议,到底是纯视觉安全,还是激光雷达呢?
上述两种方案中,特斯拉是纯视觉的坚定拥护者,而国内车企基本是靠激光雷达,只有部分低配车型上,才会使用纯视觉方案,而出事故的基本都是后者。
清华大学苏州汽车研究院智能网联中心技术总监孙辉接受采访时表示,纯视觉主要依赖模型的泛化能力,因此存在一定的漏检风险,尤其是在光线不足或过曝时,更可能失去感知能力。
但更关键的是,国内相关车企在硬件与模型训练层面相比特斯拉均有差距。
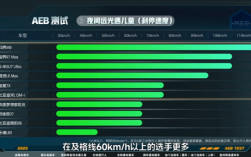
对于“纯视觉”路线的一个质疑在于其夜间表现。“目前多数特斯拉仍在使用3.0版本硬件,配备8个200万像素摄像头,144 TOPS算力,这一版本硬件的摄像头夜间成像可能存在问题。
新款Model Y使用4.0版本硬件,配备8个500万像素索尼摄像头,720 TOPS算力。索尼摄像头在光照强度仅有1勒克斯左右,也就是没有月光的夜间也能清晰成像,而在光照强度为8万—10万勒克斯的夏天正午,也不会过度曝光,所以这款摄像头对照度的适应范围远超人眼。”
相比之下,国内相关车企可能配备数量更多的摄像头,基本包括前后两只800万像素摄像头,但是摄像头对照度的适应范围可能不及特斯拉使用的索尼摄像头,可能导致夜间成像质量存疑。”
“国内车企在车载摄像头、芯片等硬件方面的配置尚可,但是训练算力与数据的缺失才是关键。”
纯视觉路线主要从硬件与软件两方面提升表现,软件方面的提升主要依赖数据,大模型训练需要海量数据,国内车企可能在这个层面不输特斯拉,但训练算力普遍不足。
比如,特斯拉V12版本FSD使用1000万段,每段1分钟时长的用户数据。如果1分钟对应的行驶距离是1公里,这意味其使用1000万公里用户驾驶数据,如此数据量难以通过数据采集的方式完成,从采集到标注的成本为七八十亿元,因此没有车企能够依靠数据采集的方式积累足够的数据。
有国内第三方智驾方案供应商告诉记者,在数据方面,特斯拉相比国内厂商确实具备很大优势,因其具有先发优势。据他预估,如果一家车企累计销量超过百万辆,便会具备“相对可以”的模型训练数据基础。
回到中国路况,国内车企没有激光雷达的辅助驾驶系统“差很多”。
其实回到两种方案之争关键核心,没有谁对谁错,只是光看结果忽略过程可能就会造成消费者的认知偏差,这是最致命的。
所以,不管到底是哪个层级的智能驾驶,最终还是应该由驾驶者来操控方向盘,而不是靠机器。